创新研发 基于图像识别与北斗定位的智能停车调研系统,引领软硬件一体化解决方案新浪潮

在城市化进程加速与汽车保有量持续攀升的背景下,停车难、管理乱、效率低已成为困扰城市治理与公众出行的普遍难题。传统的停车调研与管理系统依赖人工巡检、简单传感或单一的GPS定位,存在数据精度不足、实时性差、成本高昂且难以大规模部署等痛点。为此,我们聚焦计算机软硬件的深度研发与系统集成,创新性地提出了融合前沿图像识别技术与高精度北斗卫星定位的智能停车调研解决方案,旨在为城市规划、商业运营及智慧交通管理提供精准、高效、可扩展的数据与服务支撑。
一、 核心技术融合:图像识别与北斗定位的双擎驱动
本创新项目的核心在于两大关键技术的深度融合与协同应用。
- 高精度北斗定位技术:依托我国自主建设的北斗卫星导航系统,提供全天候、全天时、高精度的定位、导航与授时服务。在停车场景中,我们研发的专用硬件终端能够实现亚米级甚至厘米级的精确定位,准确标识停车车辆的地理位置,并记录时间戳。这不仅解决了地下车库、城市峡谷等复杂环境下的信号覆盖与精度问题,更确保了数据源的国家安全与自主可控。
- 智能图像识别技术:基于深度学习的计算机视觉算法,我们的系统能够通过部署的摄像头或移动采集设备,自动识别车辆特征(如车牌号、车型、颜色)、停车状态(驶入、停稳、驶离)以及车位占用情况。通过多角度、多帧图像的分析与融合,极大提升了车牌识别率与状态判断的准确性,有效克服了光线变化、遮挡等干扰因素。
双技术协同工作流程:当车辆进入监测区域,北斗定位模块率先捕获其精确坐标并触发图像采集;AI视觉模型随即对图像进行分析,提取车辆身份与行为信息;两者数据在边缘计算单元或云端进行时空对齐与融合,生成一条包含“何时、何地、何车、何种状态”的完整停车事件记录。这种“北斗定界,图像辨物”的模式,构成了系统高可靠性的数据基石。
二、 软硬件一体化研发:从数据采集到智能分析的全栈创新
我们的创新不仅停留在算法层面,更贯穿于从硬件设备到软件平台的全链条研发。
- 专用硬件研发与销售:
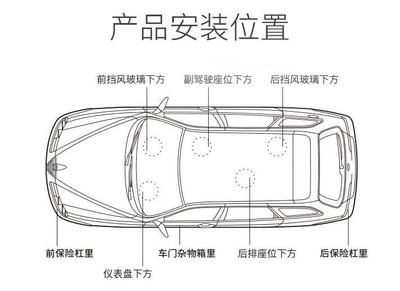
- 智能停车巡检终端:集成北斗高精度定位模组、高性能图像传感器、边缘计算芯片及4G/5G通信模块的便携式或车载式设备。具备低功耗、长续航、坚固耐用等特点,适用于移动式停车普查与动态监测。
- 固定式车位监测设备:针对路内停车位或停车场,开发小型化、低成本的专用摄像头与地磁/射频复合传感器,结合北斗定位增强基站,实现车位的全天候无人化精准监测。
- 硬件产品均提供标准化接口,支持灵活部署与规模化销售,为各类客户提供可靠的“端”侧数据入口。
- 软件平台研发与销售:
- 数据汇聚与管理平台:接收、清洗、存储来自各类硬件的海量时空数据与图像数据,建立统一的停车资源数据库。
- 智能分析云服务平台:运用大数据分析、机器学习模型,提供丰富的分析功能:包括停车热点识别、周转率计算、泊位需求预测、违章停车预警、收费模拟分析等。平台支持生成可视化报表与动态图表,为调研报告与决策提供直观支持。
- API接口与SaaS服务:向政府交通部门、商业停车场运营商、城市规划设计院、地图导航服务商等客户,提供标准化的数据接口或软件即服务(SaaS)订阅,实现停车数据的价值转化与业务赋能。
三、 应用场景与市场价值:超越调研的多元化服务
“基于图像识别与北斗定位的停车调研系统”最初虽为精准停车普查而生,但其产生的实时、精准数据流,能衍生出广泛的市场应用,创造显著价值:
- 城市智慧停车管理:为路内停车收费、停车场导引、共享停车、违停执法提供实时数据支撑,提升管理效率与收入。
- 商业与交通规划:为新建商业综合体、住宅区、交通枢纽的配建停车场规模与布局提供科学依据。
- 静态交通评估与决策:长期监测区域停车供需变化,评估政策效果(如限行、收费调整),支持智慧城市顶层设计。
- 自动驾驶与车路协同:提供高精度的动态车位地图,作为自动驾驶车辆寻找泊车位的关键信息服务。
四、
将图像识别与北斗定位技术深度融合,并贯穿于软硬件一体化的研发与销售中,不仅是对传统停车调研方法的一次革命性升级,更是开拓智慧交通静态管理新蓝海的关键举措。我们致力于通过持续的技术创新与产品迭代,为客户提供从精准数据采集到深度智能分析的全套解决方案,助力破解城市停车困局,推动智能交通产业的发展与升级,最终实现社会效益与商业价值的共赢。
如若转载,请注明出处:http://www.mskggg.com/product/66.html
更新时间:2026-06-19 05:26:33